热点文献带您关注AI与机器人——图书馆前沿文献专题推荐服务(29)
2020-12-01

在上一期AI文献推荐中,我们为您推荐了神经网络与忆阻器的热点论文。在本期推荐中,我们将为您带来人工智能与机器人相结合的前沿论文。
随着人工智能的高速发展,如何将人工智能技术与机器人技术进行深度融合,从而进一步促进机器人的智能化发展,为人类更好地服务与生产成为智能机器人的发展方向。
本期选取了4篇文献,介绍人工智能与机器人的最新动态,包括人工智能驱动的有机化合物合成规划与机器人控制的平台相结合,通过仿真神经网络训练策略训练四足机器人,用于机器人感觉信号处理的可自我修复的神经形态感受器,可捕获远距离动态运动的与深层神经网络相集成的皮肤传感器等文献,推送给相关领域的科研人员。
A robotic platform for flow synthesis of organic compounds informed by AI planning
Coley, Connor W., etc.
SCIENCE, 2019, 365(6453): 557-
The synthesis of complex organic molecules requires several stages, from ideation to execution, that require time and effort investment from expert chemists. Here, we report a step toward a paradigm of chemical synthesis that relieves chemists from routine tasks, combining artificial intelligence-driven synthesis planning and a robotically controlled experimental platform. Synthetic routes are proposed through generalization of millions of published chemical reactions and validated in silico to maximize their likelihood of success. Additional implementation details are determined by expert chemists and recorded in reusable recipe files, which are executed by a modular continuous-flow platform that is automatically reconfigured by a robotic arm to set up the required unit operations and carry out the reaction. This strategy for computer-augmented chemical synthesis is demonstrated for 15 drug or drug-like substances.阅读原文 https://science.sciencemag.org/content/365/6453/eaax1566
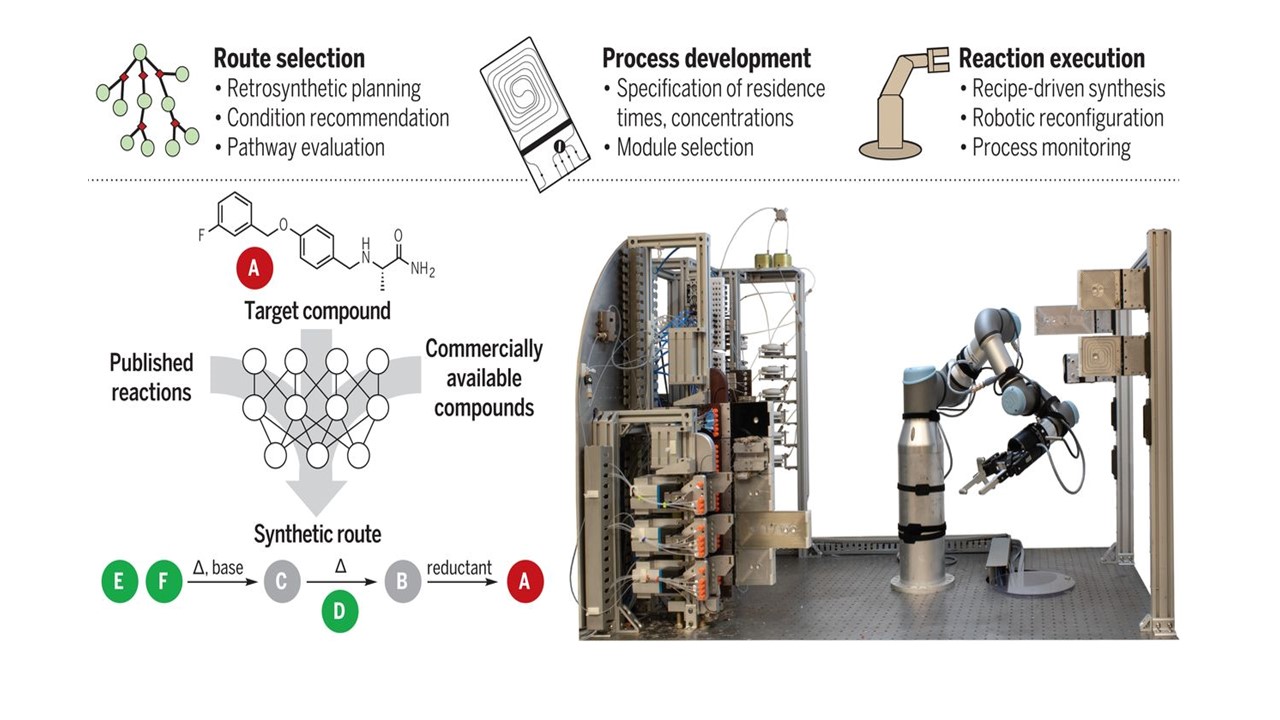
A robotically reconfigurable flow chemistry platform performs multistep chemical syntheses planned in part by AI
Learning agile and dynamic motor skills for legged robots
Hwangbo, Jemin, etc.
SCIENCE ROBOTICS, 2019, 4(26)
Legged robots pose one of the greatest challenges in robotics. Dynamic and agile maneuvers of animals cannot be imitated by existing methods that are crafted by humans. A compelling alternative is reinforcement learning, which requires minimal craftsmanship and promotes the natural evolution of a control policy. However, so far, reinforcement learning research for legged robots is mainly limited to simulation, and only few and comparably simple examples have been deployed on real systems. The primary reason is that training with real robots, particularly with dynamically balancing systems, is complicated and expensive. In the present work, we introduce a method for training a neural network policy in simulation and transferring it to a state-of-the-art legged system, thereby leveraging fast, automated, and cost-effective data generation schemes. The approach is applied to the ANYmaI robot, a sophisticated medium-dog-sized quadrupedal system. Using policies trained in simulation, the quadrupedal machine achieves locomotion skills that go beyond what had been achieved with prior methods: ANYmaI is capable of precisely and energy-efficiently following high-level body velocity commands, running faster than before, and recovering from falling even in complex configurations.阅读原文 https://robotics.sciencemag.org/content/4/26/eaau5872
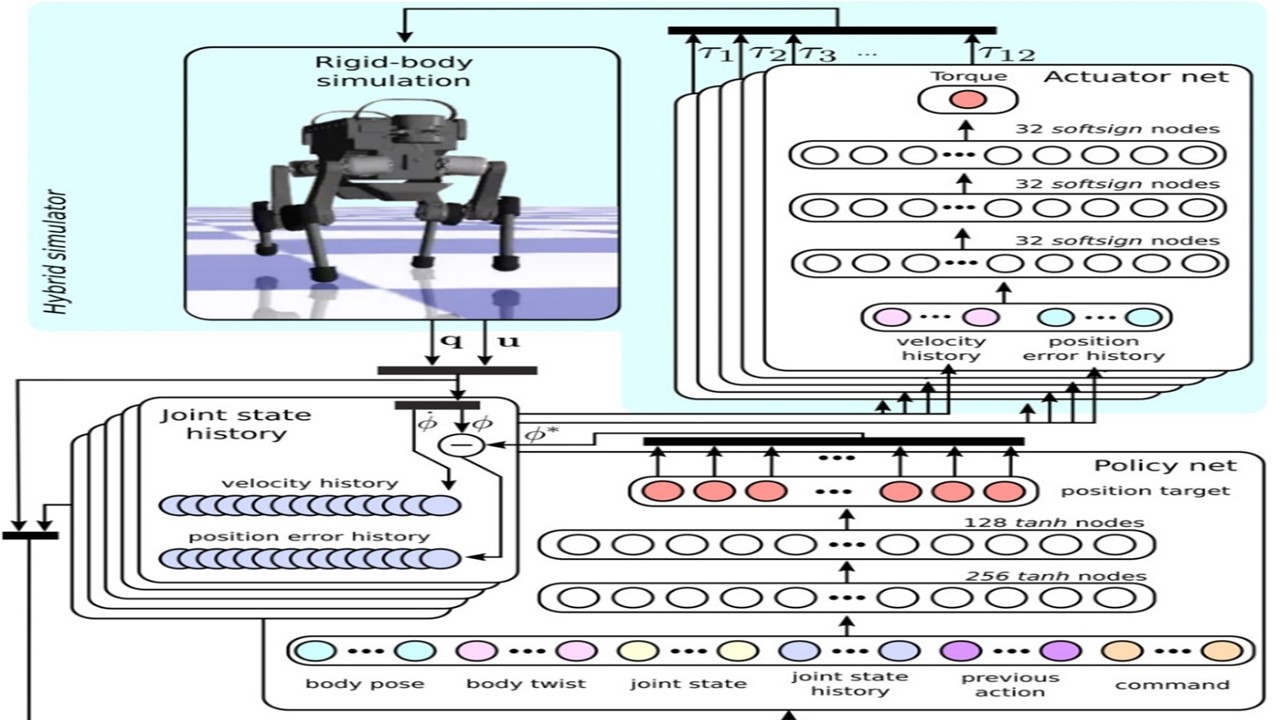
Training control policies in simulation
Self healable neuromorphic memtransistor elements for decentralized sensory signal processing in robotics
John, Rohit Abraham, etc.
NATURE COMMUNICATIONS, 2020, 11(1): 4030
Sensory information processing in robot skins currently rely on a centralized approach where signal transduction (on the body) is separated from centralized computation and decision-making, requiring the transfer of large amounts of data from periphery to central processors, at the cost of wiring, latency, fault tolerance and robustness. We envision a decentralized approach where intelligence is embedded in the sensing nodes, using a unique neuromorphic methodology to extract relevant information in robotic skins. Here we specifically address pain perception and the association of nociception with tactile perception to trigger the escape reflex in a sensorized robotic arm. The proposed system comprises self-healable materials and memtransistors as enabling technologies for the implementation of neuromorphic nociceptors, spiking local associative learning and communication. Configuring memtransistors as gated-threshold and -memristive switches, the demonstrated system features in-memory edge computing with minimal hardware circuitry and wiring, and enhanced fault tolerance and robustness. Sensory information processing in robots relies on a centralized approach with issues of wiring, fault-tolerance and latency. Here, the authors report a decentralized neuromorphic approach with self-healable memristive elements enabling intelligent sensations in a prototypical robotic nervous system.阅读原文 https://www.nature.com/articles/s41467-020-17870-6
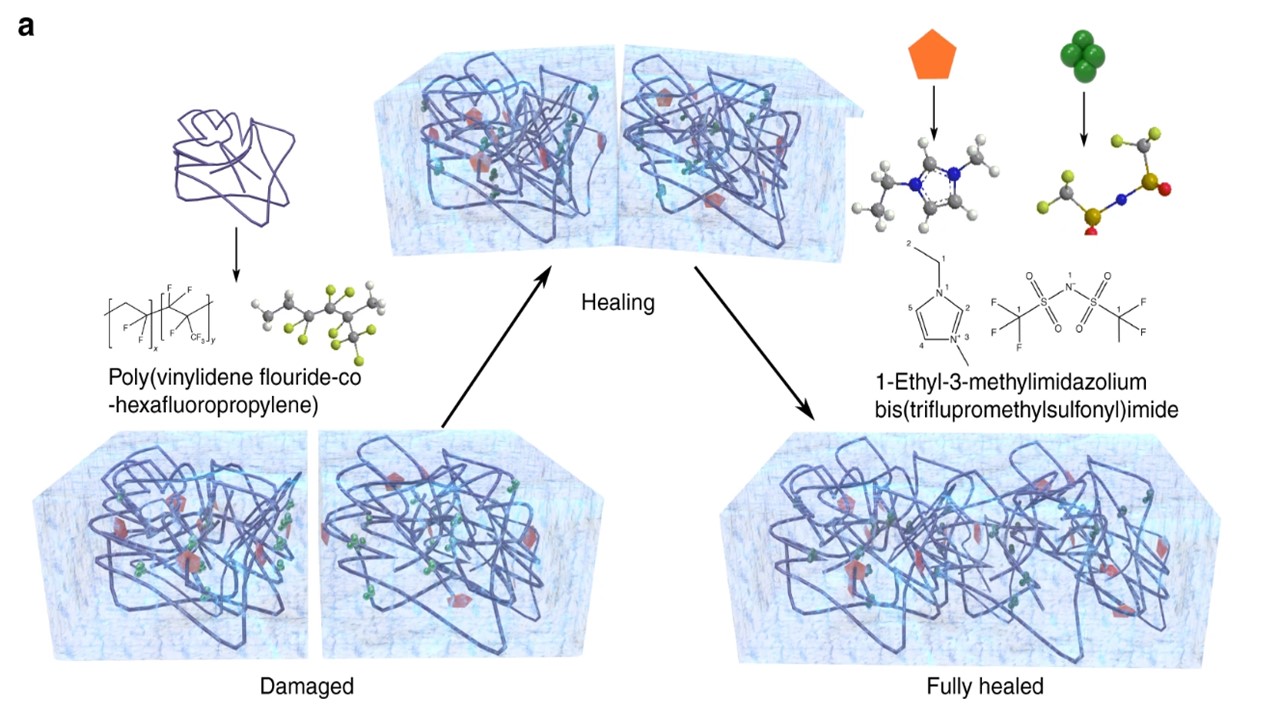
Self-healing neuromorphic elements-mechanism and satellite threshold adjusting receptors
A deep-learned skin sensor decoding the epicentral human motions
Kim, Kyun Kyu, etc.
NATURE COMMUNICATIONS, 2020, 11(1)
State monitoring of the complex system needs a large number of sensors. Especially, studies in soft electronics aim to attain complete measurement of the body, mapping various stimulations like temperature, electrophysiological signals, and mechanical strains. However, conventional approach requires many sensor networks that cover the entire curvilinear surfaces of the target area. We introduce a new measuring system, a novel electronic skin integrated with a deep neural network that captures dynamic motions from a distance without creating a sensor network. The device detects minute deformations from the unique laser-induced crack structures. A single skin sensor decodes the complex motion of five finger motions in real-time, and the rapid situation learning (RSL) ensures stable operation regardless of its position on the wrist. The sensor is also capable of extracting gait motions from pelvis. This technology is expected to provide a turning point in health-monitoring, motion tracking, and soft robotics. Real-time monitoring human motions normally demands connecting a large number of sensors in a complicated network. To make it simpler, Kim et al. decode the motion of fingers using a flexible sensor attached on wrist that measures skin deformation with the help of a deep-learning architecture.阅读原文 https://www.nature.com/articles/s41467-020-16040-y

Design of the deep-learned skin-like sensor
往期精彩推荐
前沿论文带您解读5G应用领域 ——图书馆前沿文献专题推荐服务(2)
热点论文解读AI应用领域 ——图书馆前沿文献专题推荐服务(3)
热点论文带您探究5G和未来通信——图书馆前沿文献专题推荐服务 (4)
前沿文献带您解读自然语言处理技术 ——图书馆前沿文献专题推荐服务(5)
热点论文带您探究5G和未来通信材料技术领域 ——图书馆前沿文献专题推荐服务(6)
热点论文解读AI应用领域 ——图书馆前沿文献专题推荐服务(3)
热点论文带您探究5G和未来通信——图书馆前沿文献专题推荐服务 (4)
前沿文献带您解读自然语言处理技术 ——图书馆前沿文献专题推荐服务(5)
热点论文带您探究5G和未来通信材料技术领域 ——图书馆前沿文献专题推荐服务(6)
热点文献带您关注AI情感分类技术 ——图书馆前沿文献专题推荐服务(7)
热点论文带您探究6G的无限可能——图书馆前沿文献专题推荐服务(8)
热点文献带您关注AI文本摘要自动生成 ——图书馆前沿文献专题推荐服务(9)
热点论文:5G/6G引领社会新进步——图书馆前沿文献专题推荐服务(10)
热点文献带您关注AI机器翻译 ——图书馆前沿文献专题推荐服务(11)
热点论文与您探讨5G/6G网络技术新进展——图书馆前沿文献专题推荐服务(12)
热点文献带您关注AI计算机视觉 ——图书馆前沿文献专题推荐服务(13)
热点论文与带您领略5G/6G的硬科技与新思路 ——图书馆前沿文献专题推荐服务(14)
热点文献带您关注AI计算机视觉 ——图书馆前沿文献专题推荐服务(15)
热点论文带您领略5G/6G的最新技术动向 ——图书馆前沿文献专题推荐服务(18)
热点文献带您关注图神经网络——图书馆前沿文献专题推荐服务(19)
热点论文与带您领略5G/6G材料技术的最新发展——图书馆前沿文献专题推荐服务(20)
热点文献带您关注模式识别——图书馆前沿文献专题推荐服务(21)
热点论文与带您领略6G网络技术的最新发展趋势 ——图书馆前沿文献专题推荐服务(22)
热点文献带您关注机器学习与量子物理 ——图书馆前沿文献专题推荐服务(23)
热点论文与带您领略5G/6G通信器件材料的最新进展 ——图书馆前沿文献专题推荐服务(24)
热点文献带您关注AI自动驾驶——图书馆前沿文献专题推荐服务(25)
热点论文与带您领略5G/6G网络安全和技术的最新进展——图书馆前沿文献专题推荐服务(26)
热点文献带您关注AI神经网络与忆阻器——图书馆前沿文献专题推荐服务(27)
热点论文与带您领略5G/6G电子器件和太赫兹方面的最新进展——图书馆前沿文献专题推荐服务(28)